
Note: This page is an engineering application guide based on public industry context. It does not disclose any customer project details.
Intro
Compact slope mower robots work in harsh outdoor conditions where low profile, vibration, grass impact, battery power, and service access all matter. A linear actuator can provide controlled motion for cutter deck height, blade guards, service hatches, sensor masts, and battery tray access.

Quick Recommendation
For slope mower robots, use a compact 12V or 24V DC linear actuator with protected wiring, limit switches, and a guided mechanism. The actuator should provide axial force only; guide rails, pivots, or linkages should absorb side load from slope vibration and cutting impact.
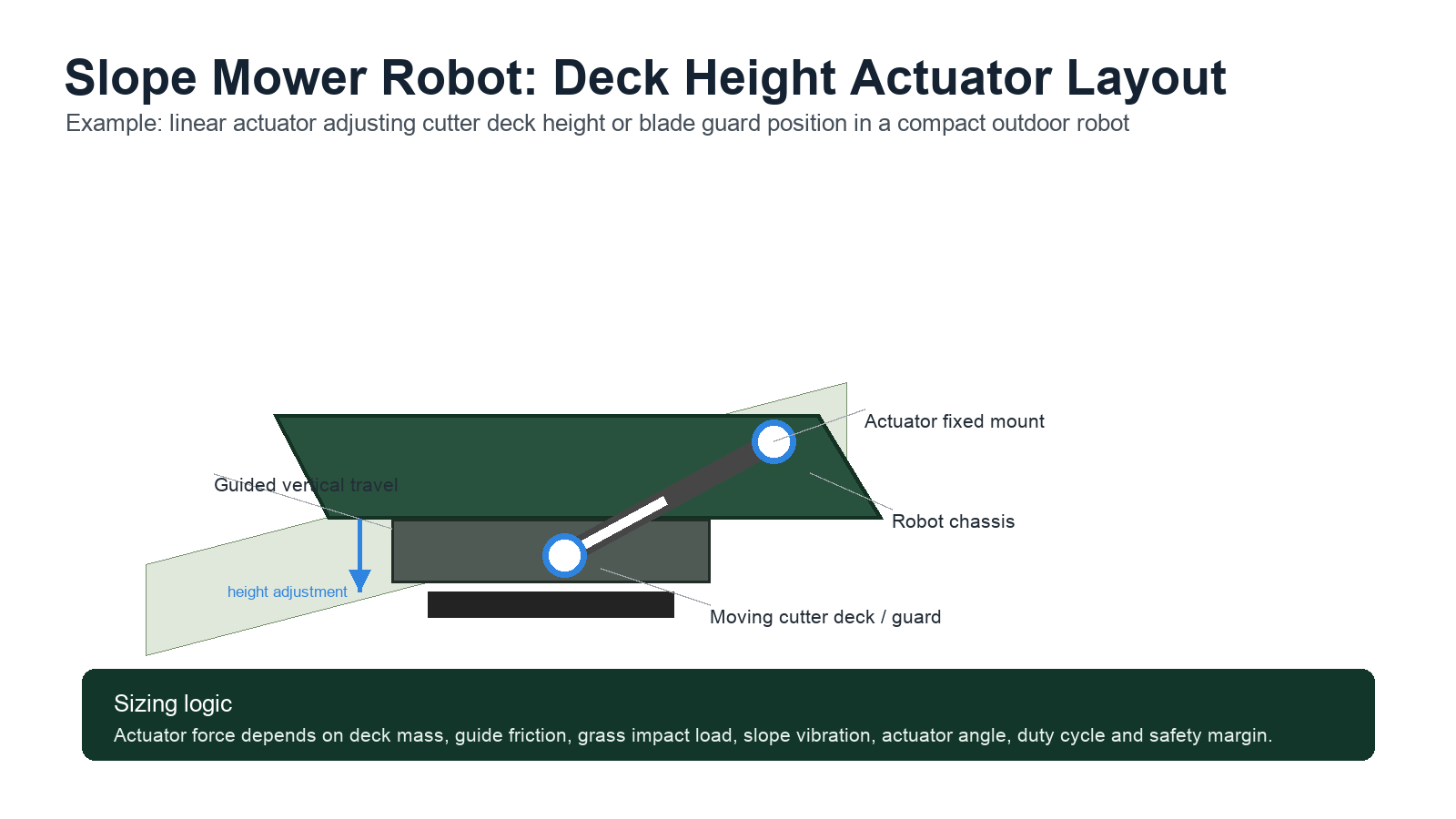
Interactive Motion Demo
The demo below shows the basic motion concept: an actuator changes the cutter deck height while the chassis stays low and stable.
Where It Fits
| Robot Area | Typical Motion | Why an Actuator Helps |
|---|---|---|
| Cutter deck | Raise or lower blade height | Allows one chassis to work across different grass height and terrain conditions. |
| Blade guard | Short protective movement | Improves service access and helps manage safety covers. |
| Service hatch | Open maintenance panel | Reduces manual disassembly for battery or blade service. |
| Sensor mast | Small vertical adjustment | Positions cameras, antennas or sensors without changing chassis height. |
| Battery tray | Slide, tilt or lift access | Supports compact packaging and repeatable maintenance motion. |
Basic Sizing Logic
For deck height adjustment, selection starts from the moving mass and guide friction:
Required actuator force ≈ deck load + guide friction + impact margin, adjusted for linkage angle
Outdoor robots need extra margin for vibration, grass/debris impact, uneven terrain, water ingress, and mechanical wear. If the actuator is not aligned with the deck travel, calculate the worst-case force at the least favorable linkage angle.
Product Parameter Selection Example
Assume a compact robotic mower uses a guided cutter deck that moves vertically by 120 mm. The deck adjustment runs intermittently and must survive vibration, debris and damp outdoor conditions.
| Parameter | Example Choice | Selection Basis |
|---|---|---|
| Rated force | 1,000–3,000 N | Selected from deck mass, guide friction, blade impact margin and slope vibration. |
| Stroke | 80–250 mm | Depends on cutting height range and linkage ratio between actuator and deck. |
| Speed | 3–12 mm/s | Slow, controlled motion protects the deck and avoids sudden height changes. |
| Voltage | 12V DC or 24V DC | Matches battery-powered mobile equipment and compact controllers. |
| Protection | Sealed wiring and suitable IP rating | Required for grass, dust, rain splash, mud and cleaning exposure. |
| Control | Limit switches; feedback optional | Limit switches cover simple height presets; feedback supports repeatable cutting recipes. |
| Mounting | Guided deck with axial actuator force | Guide rails or pivots should carry side load, not the actuator rod. |
Engineering Points
- Separate guidance and actuation. Rails or linkages should manage side load while the actuator provides push-pull force.
- Protect from debris. Keep the rod and cable path away from grass buildup, blade discharge and tire contact.
- Design for service. Outdoor robots need maintenance access for blades, batteries and sensors.
- Validate shock load. Slope work creates chassis vibration and impact loads that a bench test may miss.
Information Needed for Accurate Sizing
- Deck or moving module weight
- Required travel range and target speed
- Guide rail friction and linkage geometry
- Battery voltage and control method
- Exposure to rain, dust, grass, vibration and cleaning
- Required safety state during power loss or service
FAQ
Can a linear actuator adjust robotic mower cutting height?
Yes, if the deck is guided properly and the actuator is protected from side load, debris and impact.
Is 12V DC suitable for outdoor mower robots?
12V DC is common for battery-powered compact equipment. Larger robots may use 24V DC for lower current and better control integration.
Do I need position feedback?
Feedback is useful when the robot needs repeatable cutting height presets. Simple high/low positions may only need limit switches.
What is the biggest reliability risk?
Side load and contamination. The actuator should not be used as a guide rail, and the rod/cable path should be protected from debris.