

Selecting the right electric linear actuator or electric cylinder (servo cylinder) involves far more than simply matching a thrust force and a stroke length from a product datasheet. For original equipment manufacturers (OEMs), machine builders, and automation engineers, linear actuators are critical links in mechanical power transmission. A miscalculation in duty cycle, screw efficiency, or lateral loading will quickly result in premature component failure, structural binding, or catastrophic motor burnout.
Unlike self-supporting lifting columns, which feature integrated structural guidance to handle massive bending moments, electric linear actuators and cylinders are primarily designed for pure axial thrust.
This comprehensive engineering guide outlines a step-by-step framework to evaluate, specify, and integrate the ideal linear drive solution for industrial automation, robotics, material handling, and heavy-duty machinery.
1. Map the True Axial Force Profile: Thrust, Pull, and Dynamic Spikes
The foundation of actuator selection is defining the load. However, a single “maximum load” value is insufficient for proper component sizing. You must analyze the complete force-over-time profile:
- Thrust vs. Pull Forces: Does the actuator experience the same load when extending (pushing) as it does when retracting (pulling)? Many mechanical linkages place highly asymmetric forces on the drive rod.
- Dynamic vs. Static Load: The dynamic load is the force required to move the mass (including acceleration forces), while the static load is the holding capacity when the motor is stopped.
- Peak Shock Loads: In applications like pressing, stamping, or rugged outdoor deployment, the actuator may experience sudden, high-impact forces. If these exceed the material yielding limits of the internal mechanics, gears will strip or the lead screw will deform.
💡 Engineering Rule of Thumb: Always calculate the Root Mean Square (RMS) load across the full cycle rather than just the peak load. Size the motor and internal screw based on the continuous RMS load to avoid thermal overload, while ensuring the actuator’s mechanical structural limits can withstand the maximum peak shock load.
2. Analyze Rod Buckling and Side Load Constraints
The single most common cause of premature linear actuator failure is unintended lateral (side) loading. Standard industrial actuators and cylinders are designed to push and pull strictly along their longitudinal axis.
The Problem with Lateral Force:
If a lateral force is applied to the extending rod, it creates a leverage effect against the internal rod bushings and seals. This causes rapid seal wear, fluid or dust ingress, and eventually bends the internal screw or galling of the piston tube.
Critical Sizing Factors:
- External Guidance: If your application introduces side loads (e.g., pushing a heavy panel on a hinge), you must isolate the actuator by using external linear guide rails, linear bearings, or guide rods.
- Euler’s Buckling Limit: For long-stroke applications (typically over 500 mm) under heavy compression (thrust) loads, the extending rod acts as a structural column. You must verify that the combination of stroke length, rod diameter, and force does not exceed the critical buckling threshold, causing the rod to snap or bow outward.
3. Select the Internal Drive Mechanism: ACME vs. Ball Screw vs. Planetary Roller Screw
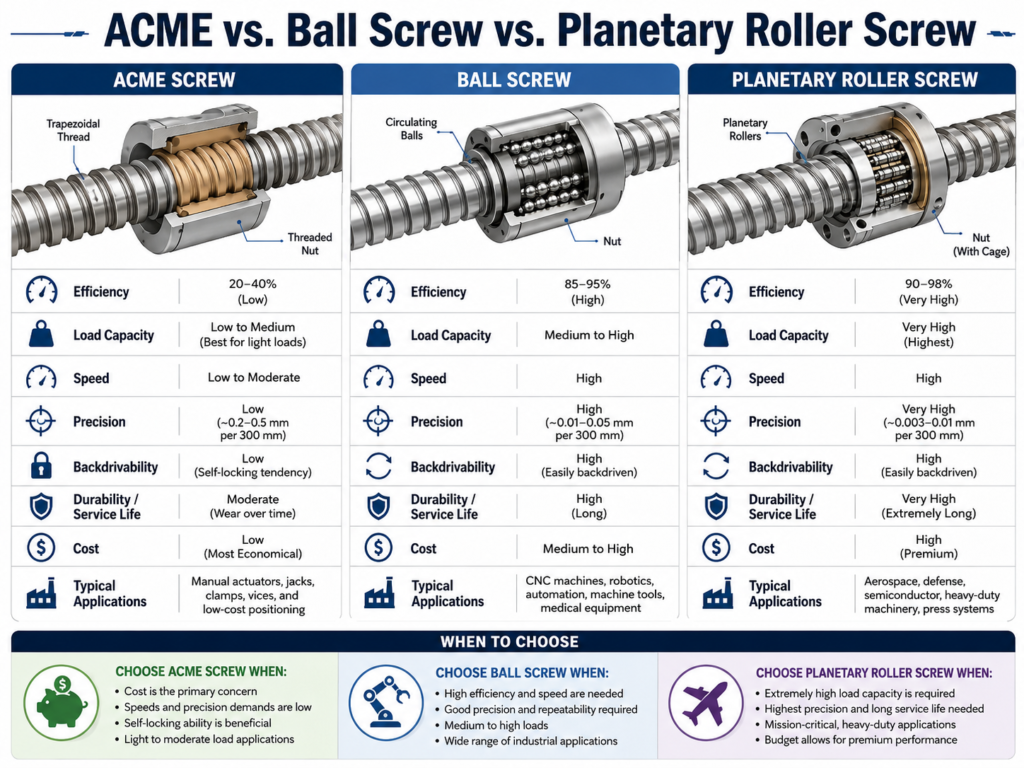
1. ACME / Trapezoidal Lead Screws (Sliding Friction)
- How it works: Uses a threaded nut sliding along a threaded screw.
- Characteristics: Low efficiency (typically 30%–40%), which means significant energy is lost as heat. However, high friction provides excellent natural self-locking capability, meaning it will not back-drive when power is removed.
- Best for: Low duty-cycle, cost-sensitive applications where a holding brake is undesirable.
2. Ball Screws (Rolling Friction)
- How it works: Utilizes recirculating ball bearings between the nut and the screw.
- Characteristics: High mechanical efficiency (90%+), minimal friction, long predictable lifecycles, and capability for high speeds and continuous cycles. However, due to low friction, ball screws can easily back-drive under load, requiring an electromagnetic motor brake to hold position.
- Best for: Industrial automation, high-speed applications, precise positioning, and high duty cycles.
3. Planetary Roller Screws (Line Contact Rolling)
- How it works: Utilizes threaded rollers rotating around the screw, providing multiple lines of contact rather than points of contact.
- Characteristics: Extreme load-density, exceptional rigidity, and the highest resistance to severe shock loads. They deliver lifecycles up to 15 times longer than ball screws under equivalent forces.
- Best for: Heavy-duty electric cylinders replacing high-pressure hydraulics, aerospace actuators, and heavy pressing/stamping machinery.
4. Align Motor Controls with Precision and Duty Cycle Requirements
The choice of motor drive directly controls the intelligence, repeatability, and duty cycle limits of the electric cylinder.
- Brushed DC Motors: Excellent for simple, cost-effective, point-to-point motion with low duty cycles ( 10%~25%). Position feedback is typically limited to basic mechanical limit switches, internal Hall sensors or potentiometer.
- Brushless DC (BLDC) Motors: Removes the wear-prone carbon brushes, allowing for significantly higher duty cycles, faster speeds, and longer operational lifecycles.
- Servo Motors (Closed-Loop Servo Cylinders): The gold standard for precision industrial automation. When paired with high-resolution absolute encoders, servo-driven electric cylinders provide programmable velocity profiles, microsecond-level synchronization, precise force control (torque monitoring), and continuous (100%) duty cycles.
5. Form Factor & Mounting Configurations
Integrating the actuator into your structural layout requires choosing the right physical envelope and mounting style.
Physical Orientation:
- Inline Configuration: The motor is mounted directly behind the actuator cylinder housing, creating a long, slim profile. Ideal for narrow spaces.
- Parallel (Foldback) Configuration: The motor is mounted parallel to the actuator cylinder body, transferring power via a high-strength timing belt or gear train. This significantly reduces the total longitudinal length of the unit.
Mounting Interfaces:
Because linear actuators must remain perfectly aligned with the load path, the mounting type is crucial:
- Clevis / Pin Mounts: Features rear and rod-end holes secured by pins. This allows the actuator to pivot or rotate smoothly through an arc as it extends, preventing structural binding in articulating linkages.
- Trunnion / Flange Mounts: Provides rigid structural mounting points directly on the cylinder housing, ideal for high-force thrust applications like heavy-duty industrial presses where zero mechanical deflection is permitted.
- Customization: You can also send us the drawing with your own design for customization mounting.
6. Environmental Sealing & Material Specifications
Industrial, outdoor, and hygienic environments place severe stress on linear seals. When an actuator extends, the rod exposes a polished surface to the environment; when it retracts, it pulls any surface contaminants back through the rod seal.
- Ingress Protection (IP Rating): Standard indoor factory automation typically requires IP54 or IP65. Extreme outdoor deployment (agricultural machinery, solar trackers) requires IP66 or IP67.
- Hygienic & Food-Grade (IP69K): Food processing and pharmaceutical packaging lines demand smooth, crevice-free stainless steel or specialized anodized aluminum designs capable of withstanding high-temperature, high-pressure chemical washdowns without fluid ingress or corrosion.
7. Quick Selection Matrix: Linear Actuators vs. Electric Cylinders
| Feature / Metric | Standard Utility Actuator | Precision Ball Screw Actuator | Heavy-Duty Servo Cylinder |
| Internal Drive | ACME Lead Screw | Precision Ball Screw | Ball or Planetary Roller Screw |
| Thrust Capability | Low to Moderate (Up to 20 kN) | Moderate to High (Up to 50 kN) | Extreme (Up to 250+ kN) |
| Max Speed | Slow (2~100mm/s) | Fast (Up to 1,000mm/s) | High Dynamic (Up to 1,500+ mm/s) |
| Duty Cycle | Intermittent (10% – 25%) | High (50% – 100%) | Continuous (100% S1 Rating) |
| Positioning Accuracy | Low (±1 ~ 3mm) | High (±0.02mm) | Ultra-High (±0.005 mm) |
8. RFQ Checklist: Parameters to Prepare for a Technical Quotation
To minimize engineering lead times and ensure an accurate application evaluation, please prepare the following parameters for our technical team:
- [ ] Primary Motion Type: (e.g., Pushing, pulling, lifting, pressing, articulating linkage)
- [ ] Dynamic Load (Normal Operating Force): (in Newtons or kg)
- [ ] Maximum Peak or Shock Load: (in Newtons or kg)
- [ ] Is there any Lateral / Side Load? (Yes/No, specify force value and external guidance mechanism if present)
- [ ] Required Stroke Length: (in mm)
- [ ] Target Velocity / Cycle Speed: (in mm/s, or total time allowed per stroke)
- [ ] Daily Duty Cycle: (Cycles per minute/hour, or percentage of run-time vs. rest-time)
- [ ] Required Positioning Repeatability: (in mm or microns)
- [ ] Motor Input Preferences: (e.g., 12/24/48VDC brush motor, 3-Phase 220/400VAC, Stepper, Brushless, Servo)
- [ ] Mounting Profile Requirement: (Inline vs. Parallel; Rear Clevis, Front Flange, Trunnion)
- [ ] Operating Environment: (Temperature limits, dust/moisture exposure, washdown chemicals, IP rating requirement)
Technical FAQ: Selecting Electric Linear Actuators
Q1: When should I choose an electric cylinder over a hydraulic cylinder?
A: Electric cylinders are specified to replace hydraulics to achieve clean operation, precise positioning control, and lower total cost of ownership. Hydraulics are prone to fluid leaks, require continuous maintenance (pumps, valves, hoses, filters), consume massive idle energy, and lack smart programming capabilities. Electric servo cylinders provide closed-loop control over position, velocity, and force, require zero fluid maintenance, eliminate environmental contamination risks, and only consume energy when actively moving.
Q2: If a ball screw is more efficient, why would I ever choose an ACME lead screw actuator?
A: The primary reasons are cost efficiency and self-locking safety. ACME screws are significantly simpler and more economical to manufacture. Furthermore, their high mechanical friction creates a natural mechanical lock. If your application only runs a few times a day and must hold a heavy load safely in position when the power is shut off without relying on an expensive electrical holding brake, an ACME screw is the ideal engineering solution.
Q3: Can I mount an electric linear actuator in any orientation?
A: Yes, electric actuators can operate vertically, horizontally, or at any angle. However, the orientation alters the force profile. In vertical applications, the actuator must overcome the full force of gravity during extension and maintain static holding capacity during rest. In horizontal applications, the actuator only needs to overcome the friction force of the payload sliding on its guidance rails plus acceleration forces.
Q4: How do I calculate the expected operational lifetime of a ball screw actuator?
A: For precision ball screw and roller screw cylinders, operational life is calculated using modified bearing life formulas ($L_{10}$ life calculation), measured in millions of revolutions or kilometers of travel. The lifetime calculation depends entirely on the applied continuous dynamic load, travel stroke per cycle, and operational cleanliness. By providing your exact duty cycle and force profile, our engineering software can generate a precise, theoretical operational lifespan report for your application.
Engineer Your Next Motion Solution With Us
Whether you are replacing an inefficient pneumatic cylinder or developing a high-force automated assembly axis, our technical team provides the deep engineering expertise required to tailor the perfect linear drive system.
[Contact Our Engineering Sales Division] to upload your CAD files, application force curves, and environment profiles for an optimized, data-backed selection review.