

Lifting columns for AGV robots are useful when a mobile platform needs to work at more than one height: docking with conveyors, reaching shelves, positioning sensors, or carrying a robot arm between workstations. The point is not to make the AGV look more complex. The point is to give the upper module a controlled vertical axis so the robot can meet the real height of the job.
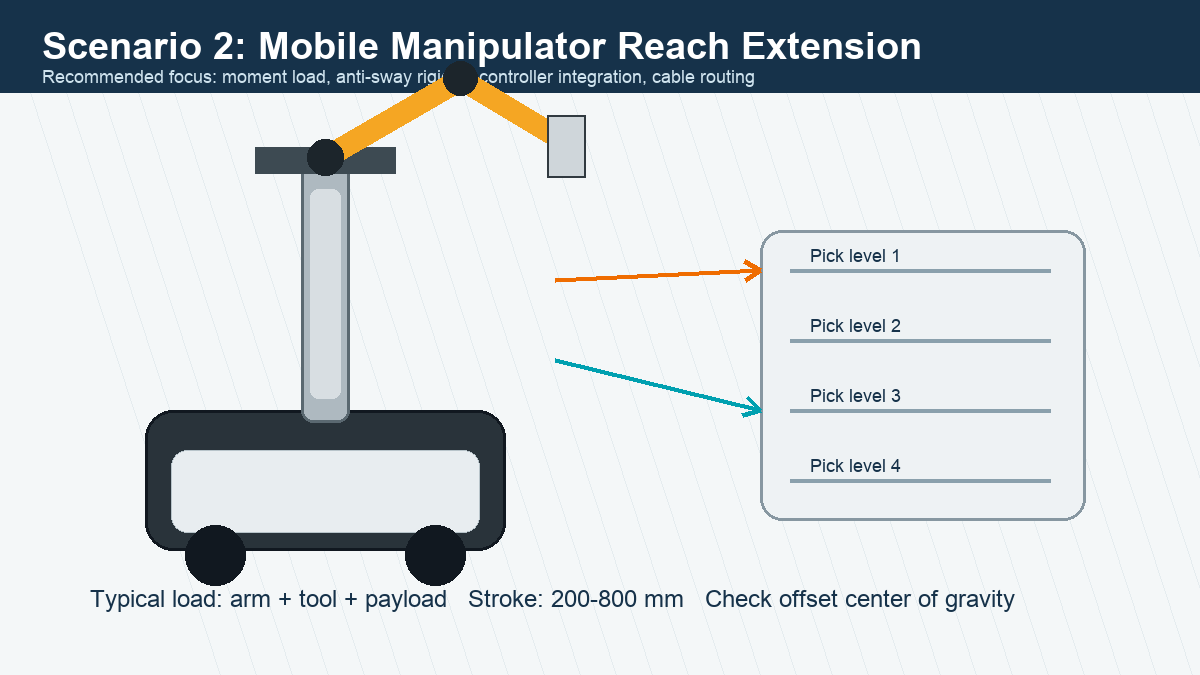
The image above shows a typical mobile manipulator concept: an AGV base, an upper working module, and a robotic arm. In this layout, the lifting column should be treated as part of the mechanical structure, not as an accessory added at the end. Its load, stroke, mounting footprint and bending moment must be checked together.
What problem does the lifting column solve?
A fixed-height AGV can move material from A to B, but it cannot always interact cleanly with equipment at different levels. One station may be a conveyor, another may be a worktable, and another may require inspection near the top of a cabinet. Without height adjustment, the robot arm or fixture has to absorb all that difference.
A dedicated vertical axis can reduce that burden. The arm can stay in a better working posture, the top fixture can align with the station, and the integrator has more freedom when the surrounding equipment is not built to one standard height.
Important data note: AGV payload is not column payload
One common mistake is to use the rated payload of the AGV chassis as the load requirement for the lifting column. These are different numbers. Public AMR platforms may be rated for 250 kg, 600 kg or more on the chassis, but the lifting column only carries the moving upper module: top plate, bracket, robot arm, end tool, cable chain and the part being handled.
For a mobile manipulator, the most critical value may not be vertical load alone. When the robot arm reaches outward, the offset creates a bending moment. That is why the selected column must be checked against lifted mass, offset distance, stroke, acceleration, braking behavior and the AGV’s center of gravity.
Interactive demo: test the selection logic
The demo below is not a product configurator. It is a simple way to think through the relationship between moving load, stroke and offset. Click a scenario or move the sliders to see why a light sensor mast, a tray lift and a mobile robot arm should not be specified with the same assumptions.
Engineering checks before choosing a model
Before selecting an electric lifting column, define the real mechanical input values. A safe inquiry should include the lifted mass, maximum offset from the column center, required stroke, closed height limit, duty cycle, speed expectation, voltage and control method.
If the AGV carries a cobot or other robot arm, use the worst-case posture for calculation. That usually means the arm is extended, the tool is loaded, and the AGV may be stopping or accelerating. In that condition, rigidity and anti-sway performance are often more important than simply choosing the highest vertical load rating.
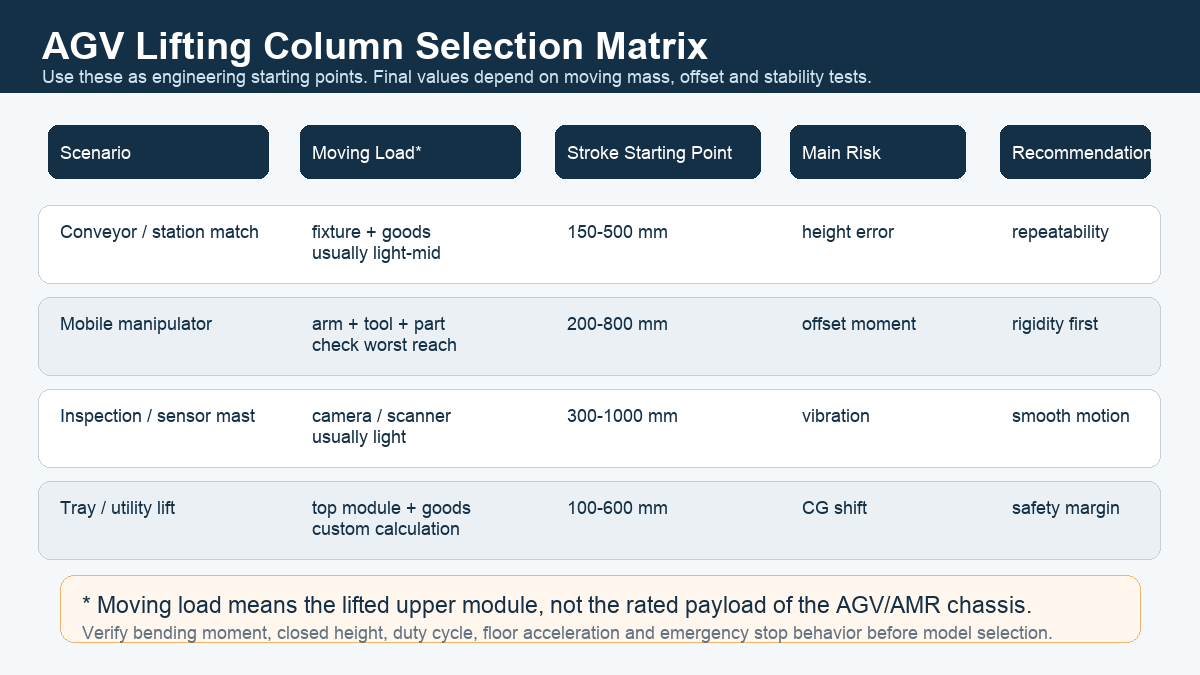
Typical AGV scenarios and practical recommendations
1. Conveyor or workstation height matching
This is one of the cleaner applications. The lift mainly brings a tray, fixture or transfer plate to the correct height. Start by measuring the height difference between stations, then add installation clearance. In many projects the stroke is moderate, but repeatability and stable stopping are important.
2. Mobile manipulator with robot arm
This is more demanding. The column supports the arm base and the moving arm creates offset moment. The key recommendation is to calculate the complete upper structure, not only the part payload. Check the arm weight, tool weight, cable routing, maximum reach and whether the AGV will lift while parked or while moving slowly.
3. Inspection, camera or sensor mast
Sensor applications are usually lighter, but they can require longer stroke and smoother motion. The column should be evaluated for vibration, cable routing and positioning stability. A fast column is not helpful if the camera shakes or the sensor cannot hold alignment.
4. Tray lift or utility platform
For trays, bins or process modules, the lifted mass can change from cycle to cycle. Leave a margin for fixture weight, product variation and emergency stopping. If the load is high or the top platform is wide, add guide structure or a multi-column solution instead of forcing one column to handle a large overturning moment.
How to prepare a reliable inquiry
- List the lifted moving mass: include the top plate, bracket, tooling, robot arm, cables and product.
- Mark the maximum offset: measure from the column center to the farthest loaded point.
- Define stroke from real station heights: do not choose stroke only because a longer value looks safer.
- Check closed height: the column must fit inside the AGV body when retracted.
- Confirm motion condition: parked lifting, slow mobile lifting and moving while extended are different cases.
- Confirm interface early: voltage, controller signal, PLC logic, limit switch and emergency stop requirements.
For more general selection logic, GeMinG also shares guidance on choosing fully automatic electric lifting columns. Related actuator options can also be reviewed from the linear actuator application pages.
Conclusion
A lifting column can make an AGV robot more useful, but only when it is selected from real mechanical data. The best starting point is not “how much can the AGV carry?” but “what exactly is being lifted, how far is it offset, and what height does the task require?” Once those values are clear, GeMinG Tech can help review stroke, load, installation space and control requirements for a suitable lifting column solution.
FAQ
Can a lifting column be used on an AGV with a robotic arm?
Yes, but the selection must include the arm weight, tool weight, part payload and offset moment at the longest reach.
Is the AGV payload the same as the lifting column load?
No. AGV payload is the chassis carrying capacity. Column load is the lifted upper module and any load attached to it.
Should the AGV lift while moving?
That depends on the system design. If lifting while moving is required, acceleration, braking, vibration and center of gravity must be reviewed carefully.