
lifting column for mobile manipulator robots are becoming more relevant as industrial robots move from fixed factory cells into rough outdoor and semi-structured work sites. A good example is RoboForce TITAN, a heavy-duty Physical AI robot built for demanding industrial environments. TITAN is not a conventional small service humanoid. It is better understood as a high-payload mobile manipulator with arms, a rugged mobile base, modular hardware, and autonomous task capability.
RoboForce publicly positions TITAN for real-world industrial deployment, including solar, data centers, shipping, mining, manufacturing, and other heavy-duty workflows. Public product information lists a 210 cm maximum height, 40 kg payload, 1100 mm arm reach, and 8-hour runtime per battery pack. The company also describes tracked, wheeled, and other mobility configurations. These facts explain why this type of robot is important for actuator engineers: it combines reach, payload, mobility, and field work in one system.

Positioning and application scenarios
The clearest positioning is high-intensity industrial labor. In solar farms, this could include carrying and positioning solar panels, assisting installation crews, or supporting inspection and maintenance work. In mining or ports, the robot can be useful where people face dust, heavy material movement, uneven ground, or repetitive handling tasks. In data centers, similar mobile manipulators can help move servers, access equipment at different cabinet heights, and support maintenance workflows. In manufacturing, the robot can serve as a flexible worker for repetitive high-load assembly or handling tasks.
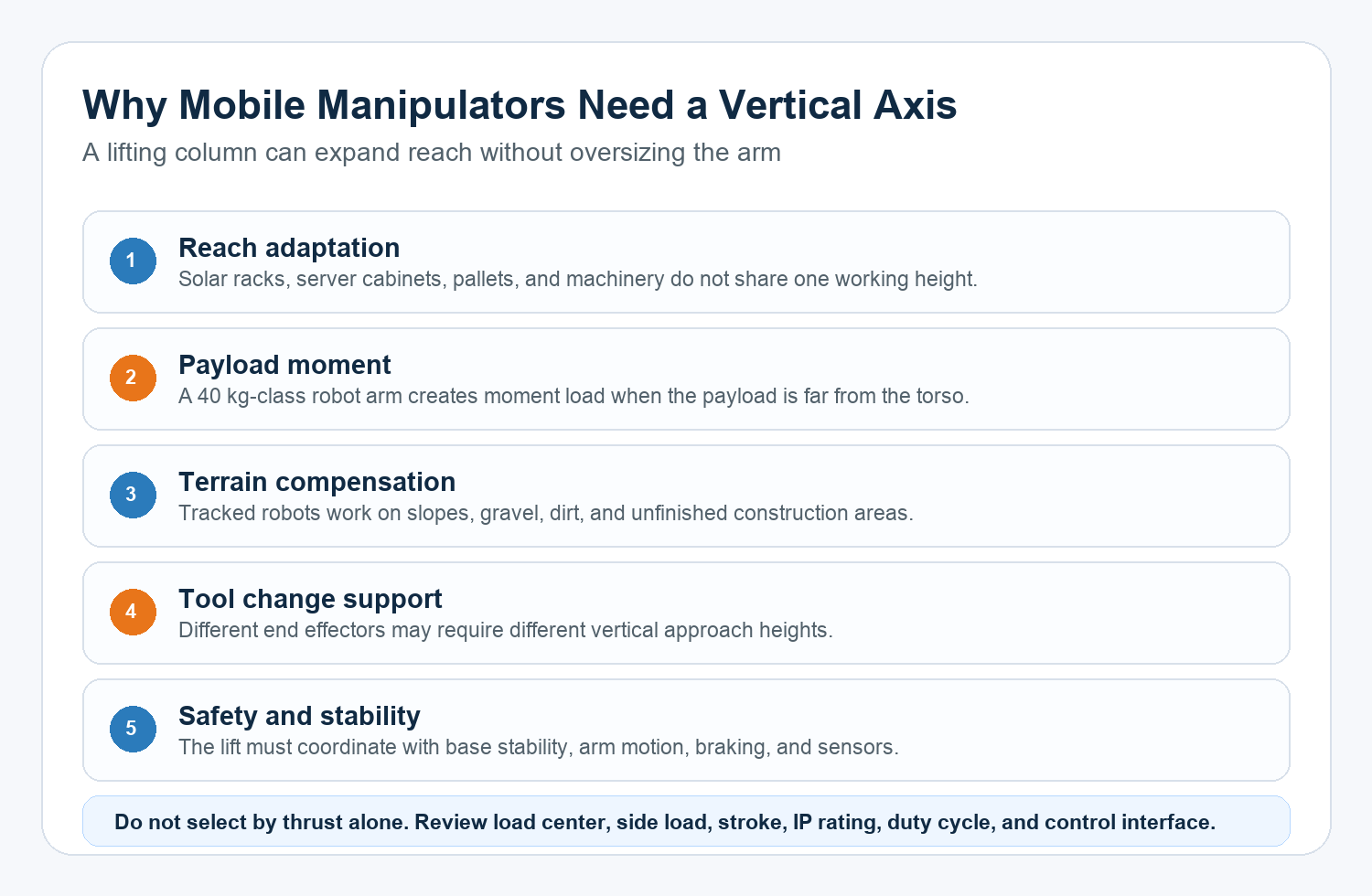
These applications share one mechanical problem: the working height changes constantly. A solar panel may be lifted from a cart, moved across rough ground, then aligned with a rack. A server may need to be moved from a lower transport position into a higher cabinet slot. A mining or port task may require the robot to pick from the ground, then place at waist or chest height. A fixed torso height forces the arm to do all the vertical work, which increases joint load, reduces effective reach, and can lower stability.

Why a lifting column matters for this robot category
A lifting column gives the mobile manipulator an additional vertical axis. Instead of relying only on shoulder, elbow, and wrist joints to reach different heights, the robot can raise or lower its torso, tool module, sensor mast, or auxiliary work platform. This can reduce awkward arm angles, improve reach, and keep the payload closer to a stable working zone.
For a robot with a 40 kg-class payload and 1100 mm reach, the main design issue is moment load. A 40 kg object held close to the body is one problem. The same object held far away from the torso is a different problem because the bending moment on the structure increases sharply. A lifting column used in this robot type must therefore be selected by load center, side load, bending moment, stroke, duty cycle, and base stability, not by thrust rating alone.
Interactive engineering check
The demo below shows why payload, reach, lift stroke, and terrain vibration should be reviewed together. It is a simplified engineering visualization, not a final sizing calculator, but it helps explain why heavy-duty mobile robots need guided lifting structures with sufficient moment resistance.
Where the lifting column can be installed
There are several possible integration locations. The first is the torso lift, where the column raises the upper body to expand the robot’s work envelope. This is useful when the robot must handle objects from ground level to chest height or above. The second is a sensor mast, where cameras, LiDAR, lighting, or inspection modules need adjustable height for mapping, alignment, or remote operation. The third is a tool lift or support lift, where the column positions a work platform, end-effector support, or material holder.

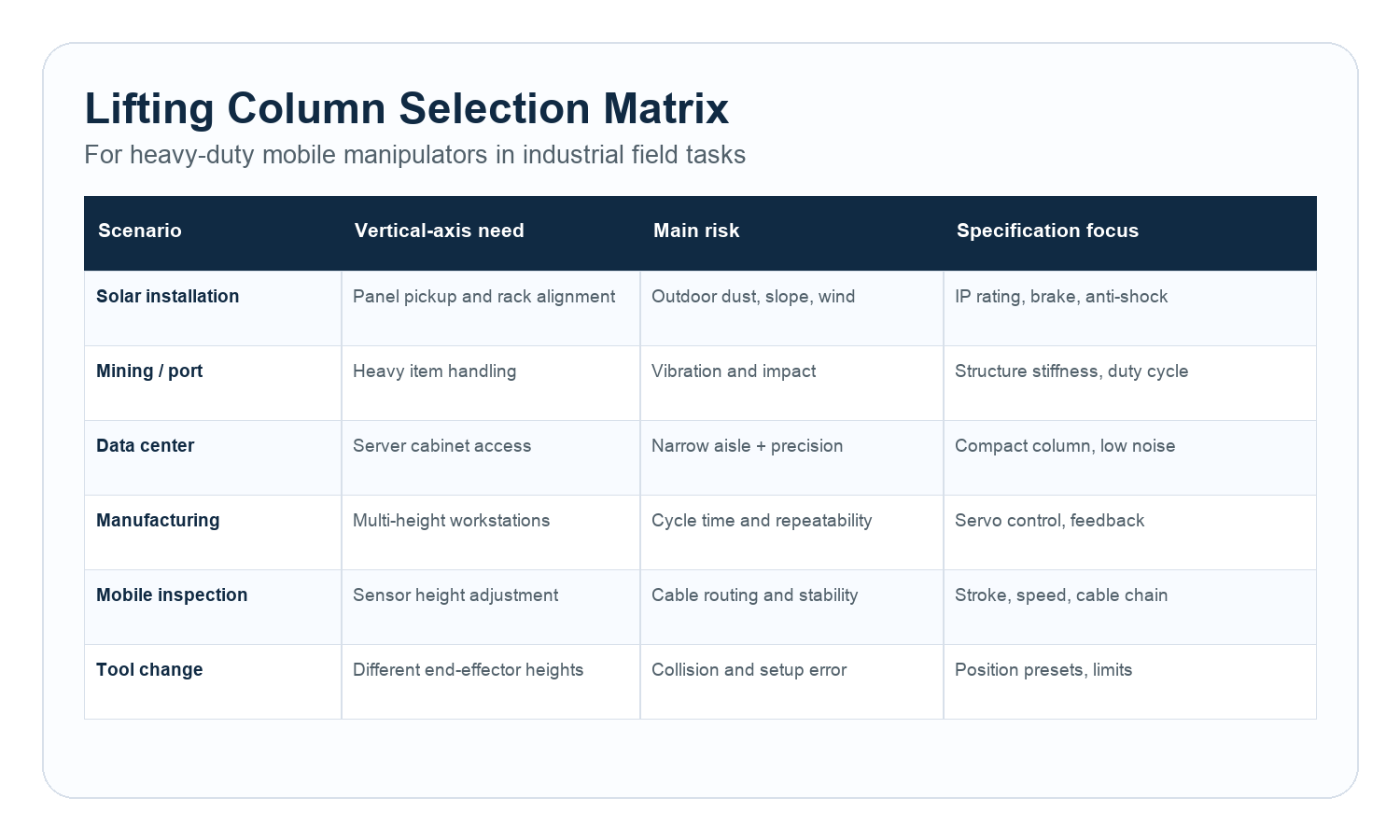
Selection matrix for real applications
The following matrix summarizes common industrial scenarios and the main lifting-column requirements. The goal is not to force one model into every robot, but to help engineers decide what should be checked before choosing a vertical axis.
Key requirements for a lifting column in a heavy-duty mobile manipulator
The first requirement is moment resistance. Mobile manipulators often work with the payload away from the robot body, so the column must resist bending and side load. The second requirement is environmental protection. Solar farms, mines, ports, and outdoor construction sites expose the robot to dust, moisture, vibration, temperature variation, and impact.
Why not simply use a longer robot arm?
A longer arm can increase reach, but it also increases joint torque, structural weight, and control difficulty. For heavy-duty field robots, extending the arm is not always the best way to solve height variation. A lifting column can move the whole working frame upward or downward, allowing the arm to operate closer to its efficient posture. This is especially valuable when the robot repeatedly handles heavy objects at different heights.
The same logic applies to end-effectors. A modular robot may switch between grippers, hooks, suction tools, torque tools, and inspection heads. Each tool may have a different ideal approach height. A vertical lifting axis makes that tool change more practical because the robot can adapt mechanically rather than forcing every task into one fixed body height.
How GeMinG can support this type of robot project
GeMinG provides electric lifting column, linear actuator, servo lifting, and customized motion solutions for industrial equipment and robotics. For heavy-duty mobile manipulator projects, GeMinG can review load, stroke, speed, duty cycle, installation space, IP requirement, motor control, feedback, braking, and mounting structure.
For robots used in solar, mining, logistics, manufacturing, or data center automation, the correct actuator solution should be designed together with the chassis, upper body, battery layout, arm motion envelope, and safety system. GeMinG can also provide broader guidance through its robot and cobot application references and its guide on choosing fully automatic electric lifting columns and Multi-stage column height calculator.
Information needed before engineering selection
To recommend a reliable lifting column for a heavy-duty mobile manipulator, prepare the target payload, load center, required stroke, minimum and maximum height, speed, acceleration profile, duty cycle, terrain condition, vibration level, installation space, power supply, control interface, braking requirement, IP rating, and expected operating temperature range.
If the vertical axis carries the robot torso, the engineering review must also include center of gravity, overturning moment, base width, slope angle, arm reach, and emergency-stop behavior. These factors decide whether a single lifting column, dual-column structure, wider guided module, or custom telescopic system is more suitable.
FAQ
Can a lifting column carry a 40 kg robot payload?
Yes, the payload of a servo lifting column is customized; the column must be selected by moment load, side load, stroke, and base stability.
What is the most important specification?
For this robot category, moment resistance and stability are usually more important than thrust alone. Environmental protection, braking, feedback, and control compatibility are also critical.